
Radio Telemetry Tracker

2015 Radio Telemetry Tracker during Desert Flight Testing
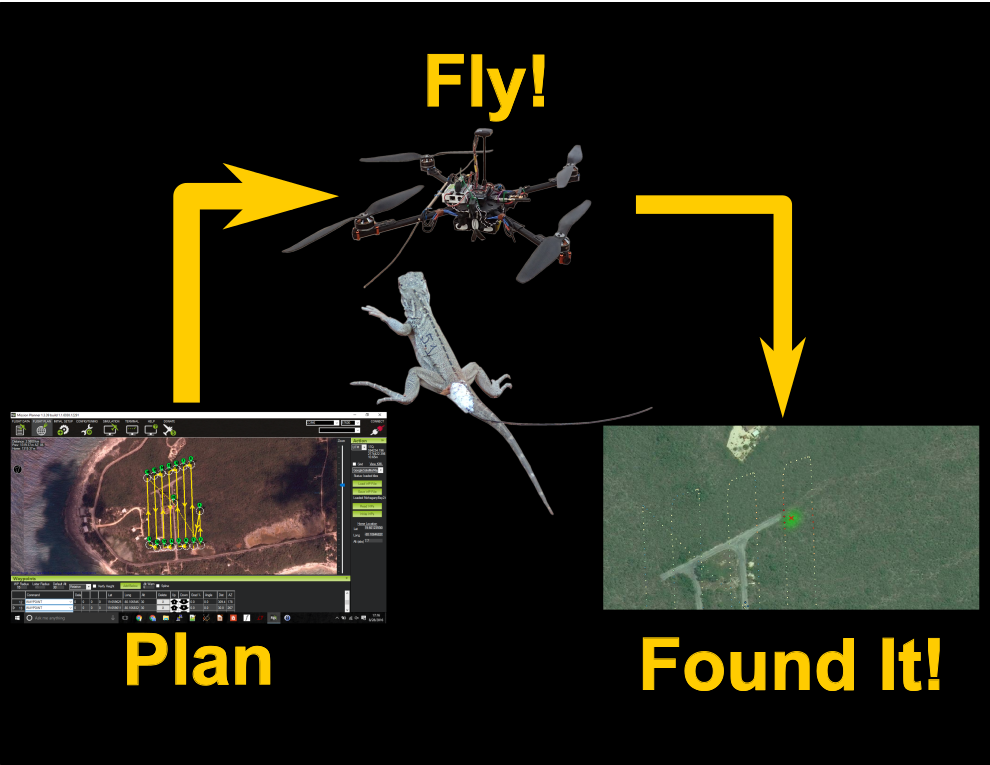
The Radio Telemetry Tracker project is a collaboration between the San Diego Zoo’s Beckman Institute for Conservation Research (ICR) and UC San Diego’s Engineers For Exploration. We have been working with the ICR and its collaborators to develop a drone to conduct radio telemetry tracking missions. Tracking wildlife radio collars is the most effective way of monitoring animal movement patters, however, this is limited by the speed at which researchers can traverse over the terrain in the area where these animals reside. The Radio Telemetry Tracker project addresses these challenges by adapting new technology to approach this problem in a new direction. Ultimately, the goal of this project is to develop a tool for researchers to do more and better research in less time and with less effort. To accomplish this, our system flies a search grid over a candidate area while recording a large swath of radio spectrum using a software defined radio. Once the drone returns from the flight, we use digital signal processing to extract the frequencies that the radio transmitters are transmitting on, and use a statistical model to determine where the transmitters we heard are. This data is then saved to a GIS (Geographical Information System) file, which ecologists and biologists can then use in their research.
Radio Telemetry Tracker System Diagram
Since the start of this project, we have had the opportunity to use this platform in the field. In a 2015 collaboration with Stesha Pasachnik (San Diego Zoo), we took the Radio Telemetry Tracker to the Dominican Republic to study the rhinoceros iguana (Cyclura cornuta) and the Ricord’s iguana (Cyclura ricordi). Then, in a 2016 collaboration with Jennette Moss (Mississippi State University) and Glenn Gerber (San Diego Zoo), we took the Radio Collar Tracker to Little Cayman to study the Sister Isle’s Rock Iguana (Cyclura nubila caymanensis).
Project Lead: Tyler Flar (tflar@ucsd.edu)
PUBLICATIONS
-
Hui, N. T., Lo, E. K., Moss, J. B., Gerber, G. P., Welch, M. E., Kastner, R., & Schurgers, C. (2021). A more precise way to localize animals using drones. Journal of Field Robotics, 1– 12. https://doi.org/10.1002/rob.22017
-
Nathan Hui, “Efficient Drone-based Radio Tracking of Wildlife“, MS Thesis, Department of Electrical Engineering, University of California San Diego, May 2019 (pdf)
-
Daniel Webber, Nathan Hui, Ryan Kastner and Curt Schurgers, “Radio receiver design for Unmanned Aerial wildlife tracking,” 2017 International Conference on Computing, Networking and Communications (ICNC), Santa Clara, CA, 2017, pp. 942-946, doi: 10.1109/ICCNC.2017.7876260
-
Gilberto Antonio Marcon dos Santos, Zachary Barnes, Eric Lo, Bryan Ritoper, Lauren Nishizaki, Xavier Tejeda, Alex Ke, Han Lin, Curt Schurgers, Albert Lin, Ryan Kastner, “Small Unmanned Aerial Vehicle System for Wildlife Radio Collar Tracking”, MASS, 2014, 2014 IEEE 11th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), 2014 IEEE 11th International Conference on Mobile Ad Hoc and Sensor Systems (MASS) 2014, pp. 761-766, doi:10.1109/MASS.2014.48 (pdf)
PRESS RELEASES
Tracking Iguanas from the Sky: Drone Research in the Cayman Islands
In the video above we show some of the progress made during the summer of 2020.