
New Platform: Stereo Diving Rig!

Introducing E4E’s newest platform for underwater remote imaging…the stereo diving rig!
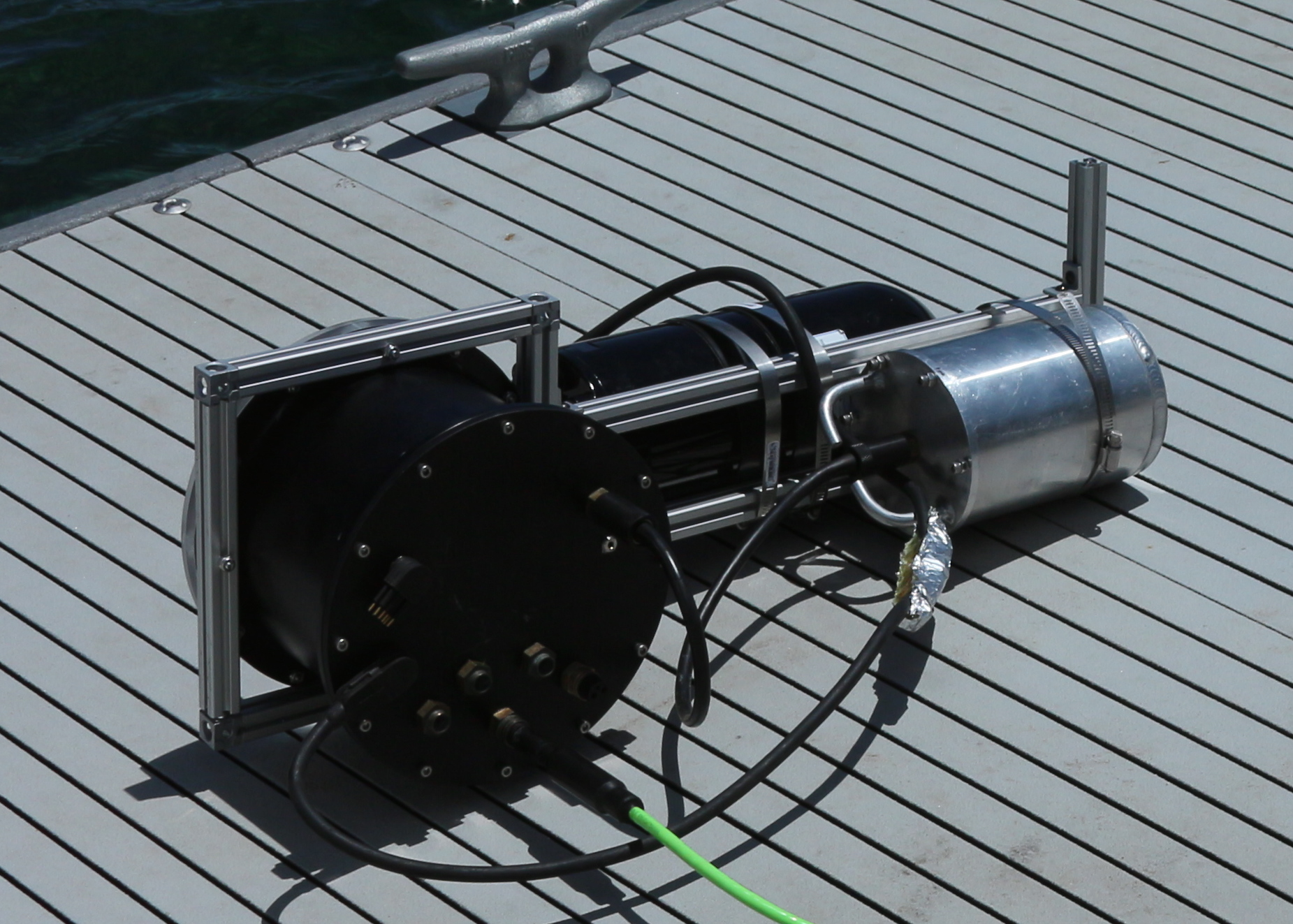
The stereo diving rig is designed to make high-accuracy models of underwater environments by fusing Structure from Motion models from stereo cameras with measurements from a variety of other on-board sensors. The rig contains four on-board cameras - two low-resolution machine vision cameras in stereo, and two DSLR-quality Sony QX100 cameras in stereo - which are used to create photorealistic models of underwater scenes using Structure from Motion algorithms. The rig also contains a compass and pressure sensor, an inertial measurement unit (IMU), and a Doppler Velocity Logger (DVL). These sensors help the rig gain more accurate pose estimates, which can be integrated into our Structure from Motion models to generate more accurate 3D imagery.
The rig is operated by a SCUBA diver, who swims to propel the rig around a dive site, such as a shipwreck or underwater cave. The data the rig collects is post-processed after a dive to generate a realistic 3D model of the underwater environment. The rig is designed to go to depths of at least 100 meters.

One of the many target applications for the stereo diving rig is in the domain of nautical archaeology, where it has the potential to help archaeologists streamline the process of recording shipwrecks. The 3D models generated by the rig could help partially supplant the laborious process of taking measurements of the structure of a wreck with tape measures and dive slates, and instead allow archaeologists to quickly capture the exact structure of wreck sites using cameras and Structure from Motion software.
The rig can also be deployed in any underwater site accessible to a SCUBA diver, and can be applied to other areas of interest to both archaeologists and conservationists, such as mapping coral reefs or underwater caves.