
OpenROV for Underwater Exploration
Engineers for Exploration is working on developing an enhanced OpenROV for underwater research and exploration.
The OpenROV is an open-source remotely operated underwater vehicle, which is used for underwater exploration by hobbyists and researchers alike. Its low cost, open design, and ease of modification makes it ideal for many applications in underwater research, and it has been used to map underwater caves in Mexico, find shipwrecks in Lake Tahoe, and observe schools of fish, among other exciting applications. However, it is not robust enough for many of our research applications, and repairs in the field are often infeasible.
We are redesigning our OpenROV to enhance it for research and exploration, building off of the existing open-source OpenROV design. We aim to develop a vehicle that is still low-cost and accessible to researchers on a limited budget, but will provide a rugged platform for field research.
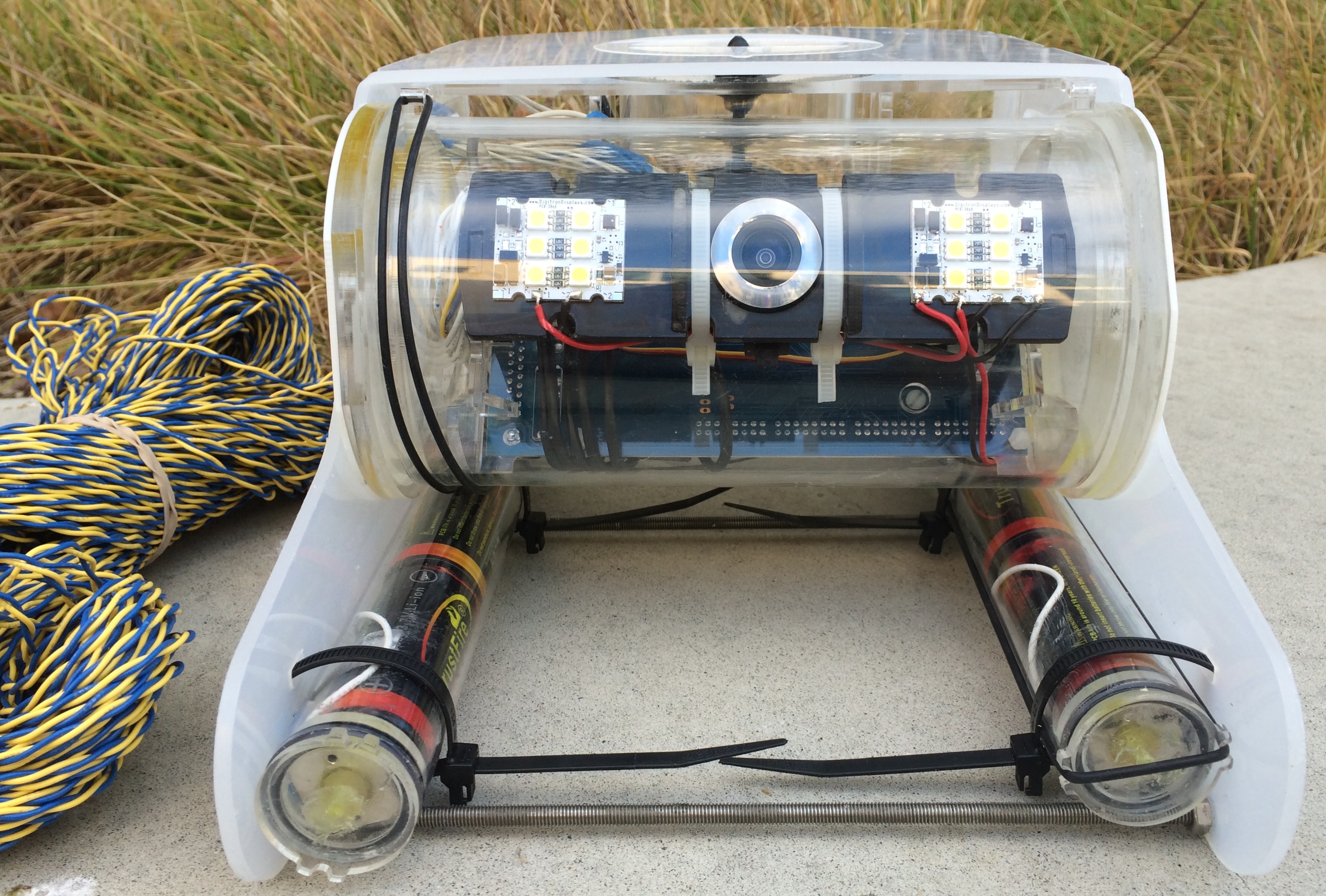
We are currently testing our existing OpenROV (pictured above) to determine its failure points under different conditions. We are in the process of redesigning the main pressure tubes and investigating different materials which are stronger than the acrylic currently used. We are also modifying the chassis of the vehicle to be more hydrodynamic, which may allow for improved battery life and deployment time. Check back for updates as we progress on this project.