
Archive of posts from 2014
-
Sony QX1 Triggering
Posted on Dec 3, 2014
 We’ve grown quite fond of Sony’s QX100 on our platforms for its superb image quality in a small form factor. However, it has been difficult to remotely control the camera, and we’re still using a servo pushing a button to take pictures.
QX1 (left), QX100 (right)
We recently acquired the Sony’s newest lens cameras: the QX1. The larger APS-C sensor and interchangeable lens provide for higher image quality, though at the expense of increased weight. We’ve paired the QX1 with Sony’s 20mm f/...
We’ve grown quite fond of Sony’s QX100 on our platforms for its superb image quality in a small form factor. However, it has been difficult to remotely control the camera, and we’re still using a servo pushing a button to take pictures.
QX1 (left), QX100 (right)
We recently acquired the Sony’s newest lens cameras: the QX1. The larger APS-C sensor and interchangeable lens provide for higher image quality, though at the expense of increased weight. We’ve paired the QX1 with Sony’s 20mm f/...
Atmel Tech on Tour at UC San Diego
Posted on Dec 3, 2014
 On December 2nd, the Atmel University Program visited UC San Diego for the Tech On Tour (TOT) seminar sponsored by Digi-Key. As part of the tour, Atmel brought their trailer on campus to host the Xmega Robot Lab, a basic introduction to microcontroller based robotics. As a number of our projects use Atmel microcontrollers, we were invited to showcase some of our work by Atmel’s trailer. We brought the TunnelBot (ATMega328p), the balloon based stabilized aerial camera platform (ATMega328p/ATMe...
On December 2nd, the Atmel University Program visited UC San Diego for the Tech On Tour (TOT) seminar sponsored by Digi-Key. As part of the tour, Atmel brought their trailer on campus to host the Xmega Robot Lab, a basic introduction to microcontroller based robotics. As a number of our projects use Atmel microcontrollers, we were invited to showcase some of our work by Atmel’s trailer. We brought the TunnelBot (ATMega328p), the balloon based stabilized aerial camera platform (ATMega328p/ATMe...
Tech to Reconnect at the San Diego Zoo
Posted on Oct 24, 2014
 E4E demonstrated some of our remote imaging platforms at the first event in the Tech to Reconnect series at the San Diego Zoo. This lecture series features speakers who have invented tools to help people engage with nature in inventive ways. Our advisor Albert Lin was one of the featured speakers! And one of our alumni and current staff scientist Eric Lo was featured in the Tech to Reconnect promotional video below.
Tech To Reconnect | San Diego Zoo
We brought our stereo diving rig, our n...
E4E demonstrated some of our remote imaging platforms at the first event in the Tech to Reconnect series at the San Diego Zoo. This lecture series features speakers who have invented tools to help people engage with nature in inventive ways. Our advisor Albert Lin was one of the featured speakers! And one of our alumni and current staff scientist Eric Lo was featured in the Tech to Reconnect promotional video below.
Tech To Reconnect | San Diego Zoo
We brought our stereo diving rig, our n...
Automated Wildlife Radio Collar Tracking: Summer 2014 REU
Posted on Oct 7, 2014
 Although wildlife radio collar tracking is common practice in wildlife research, VHF tracking has not changed much in the past half century. It requires the researchers to go to the field on foot carrying a bulky directional antenna and listening to the received signals. The process of tracking down the collared animals can take anywhere from minutes to hours, depending on the environment. In some cases, it may even be prohibitive to attempt collar tracking, as the number of animals that can ...
Although wildlife radio collar tracking is common practice in wildlife research, VHF tracking has not changed much in the past half century. It requires the researchers to go to the field on foot carrying a bulky directional antenna and listening to the received signals. The process of tracking down the collared animals can take anywhere from minutes to hours, depending on the environment. In some cases, it may even be prohibitive to attempt collar tracking, as the number of animals that can ...
Fall 2014 Recruiting
Posted on Oct 6, 2014
 If you’re interested in joining, our fall kickoff meeting will be at Atkinson Hall (Calit2) this Thursday 10/9/2014 from 4:30-5:30. We’ll be discussing how to get started with our program and the projects and what our goals are for the year.
If you’re interested in joining, our fall kickoff meeting will be at Atkinson Hall (Calit2) this Thursday 10/9/2014 from 4:30-5:30. We’ll be discussing how to get started with our program and the projects and what our goals are for the year.
Scripps Plankton Camera: Summer 2014 REU
Posted on Sep 14, 2014
 Plankton are often overlooked creatures, but not by the researchers at Engineers for Exploration who partnered with the Jaffe Lab at Scripps Institute of Oceanography for the study of these small creatures. These tiny animals are the foundation of the entire marine ecosystem. Without them, the ocean would cease to function; we would have no whales, coral reefs, or even fish.
With that knowledge, it is extremely important that we closely study plankton, and how humans affect them. But this is...
Plankton are often overlooked creatures, but not by the researchers at Engineers for Exploration who partnered with the Jaffe Lab at Scripps Institute of Oceanography for the study of these small creatures. These tiny animals are the foundation of the entire marine ecosystem. Without them, the ocean would cease to function; we would have no whales, coral reefs, or even fish.
With that knowledge, it is extremely important that we closely study plankton, and how humans affect them. But this is...
Water Visibility Survey for Underwater Vaquita Camera Traps
Posted on Sep 11, 2014
 Last week our collaborators at the San Diego Zoo Institute for Conservation Research visited San Felipe as part of their ongoing Community-Based Conservation of Vaquita project. Along the way, they were kind enough to take some water visibility measurements for us so we could get an idea of the clarity of the water in the areas we’ll be deploying cameras to take pictures of vaquita. We are planning to deploy camera traps in an area south of Rocas Consag, a tiny granite outcrop around 17 miles...
Last week our collaborators at the San Diego Zoo Institute for Conservation Research visited San Felipe as part of their ongoing Community-Based Conservation of Vaquita project. Along the way, they were kind enough to take some water visibility measurements for us so we could get an idea of the clarity of the water in the areas we’ll be deploying cameras to take pictures of vaquita. We are planning to deploy camera traps in an area south of Rocas Consag, a tiny granite outcrop around 17 miles...
2014 Summer REU
Posted on Sep 7, 2014
 (Photo (left to right): Dasun Hemachandra, Angela To, Gilberto Marcon dos Santos, Dustin Mendoza, advisor Ryan Kastner, Zach Barnes, prototyping lab engineer Frank Cardone, Traci Takasugi, Eric Lo, advisor Curt Schurgers, Luke DeLuccia, Paul Owens, Jordann McCarty, Sabrina Trinh, Xavier Tejeda, Antonella Wilby, advisor Albert Lin)
The 2014 Summer Research Experiences for Undergraduates (REU) Program has come to an end. This year's students spent 10 weeks in an immersive research experience, e...
(Photo (left to right): Dasun Hemachandra, Angela To, Gilberto Marcon dos Santos, Dustin Mendoza, advisor Ryan Kastner, Zach Barnes, prototyping lab engineer Frank Cardone, Traci Takasugi, Eric Lo, advisor Curt Schurgers, Luke DeLuccia, Paul Owens, Jordann McCarty, Sabrina Trinh, Xavier Tejeda, Antonella Wilby, advisor Albert Lin)
The 2014 Summer Research Experiences for Undergraduates (REU) Program has come to an end. This year's students spent 10 weeks in an immersive research experience, e...
Pressure Testing OpenROV Housings
Posted on Aug 31, 2014
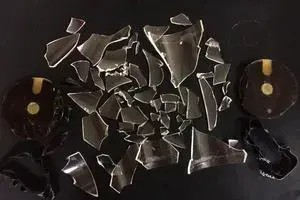 As part of our ongoing OpenROV redesign effort, we destructively pressure tested the main OpenROV pressure tube (which contains the camera, computer, and other electronics) and the battery tubes to determine at what pressure they would fail. The video below shows the main pressure tube being tested to catastrophic failure in the pressure tank at the Southwest Fisheries Science Center Acoustics Lab.
Video: The OpenROV main tube imploding
The pressure tubes are made of 1/8-inch thick acryl...
As part of our ongoing OpenROV redesign effort, we destructively pressure tested the main OpenROV pressure tube (which contains the camera, computer, and other electronics) and the battery tubes to determine at what pressure they would fail. The video below shows the main pressure tube being tested to catastrophic failure in the pressure tank at the Southwest Fisheries Science Center Acoustics Lab.
Video: The OpenROV main tube imploding
The pressure tubes are made of 1/8-inch thick acryl...
OpenROV for Underwater Exploration
Posted on Aug 25, 2014
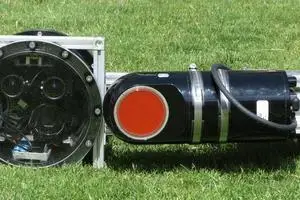
 Engineers for Exploration is working on developing an enhanced OpenROV for underwater research and exploration.
The OpenROV is an open-source remotely operated underwater vehicle, which is used for underwater exploration by hobbyists and researchers alike. Its low cost, open design, and ease of modification makes it ideal for many applications in underwater research, and it has been used to map underwater caves in Mexico, find shipwrecks in Lake Tahoe, and observe schools of fish, among othe...
Engineers for Exploration is working on developing an enhanced OpenROV for underwater research and exploration.
The OpenROV is an open-source remotely operated underwater vehicle, which is used for underwater exploration by hobbyists and researchers alike. Its low cost, open design, and ease of modification makes it ideal for many applications in underwater research, and it has been used to map underwater caves in Mexico, find shipwrecks in Lake Tahoe, and observe schools of fish, among othe...
Test of Aerial Imaging Resolution for Aerial Surveys of Vaquita
Posted on Aug 14, 2014
 One of the goals of the vaquita project is to use low-cost, unmanned planes to do aerial surveys of the Vaquita Refuge and surrounding areas in order to provide visual evidence of vaquita outside the refuge. Visual sightings will provide support to the International Committee for the Recovery of the Vaquita’s (CIRVA) recommendation that the gillnet fishing ban be extended from beyond the Vaquita Refuge to cover the entire range of the vaquita, if the species is to be saved.
This week we ran...
One of the goals of the vaquita project is to use low-cost, unmanned planes to do aerial surveys of the Vaquita Refuge and surrounding areas in order to provide visual evidence of vaquita outside the refuge. Visual sightings will provide support to the International Committee for the Recovery of the Vaquita’s (CIRVA) recommendation that the gillnet fishing ban be extended from beyond the Vaquita Refuge to cover the entire range of the vaquita, if the species is to be saved.
This week we ran...
New Platform: Stereo Diving Rig!
Posted on Jul 20, 2014
 Introducing E4E’s newest platform for underwater remote imaging…the stereo diving rig!
The stereo diving rig is designed to make high-accuracy models of underwater environments by fusing Structure from Motion models from stereo cameras with measurements from a variety of other on-board sensors. The rig contains four on-board cameras - two low-resolution machine vision cameras in stereo, and two DSLR-quality Sony QX100 cameras in stereo - which are used to create photorealistic models of unde...
Introducing E4E’s newest platform for underwater remote imaging…the stereo diving rig!
The stereo diving rig is designed to make high-accuracy models of underwater environments by fusing Structure from Motion models from stereo cameras with measurements from a variety of other on-board sensors. The rig contains four on-board cameras - two low-resolution machine vision cameras in stereo, and two DSLR-quality Sony QX100 cameras in stereo - which are used to create photorealistic models of unde...
Expedition Lake Tahoe
Posted on Jun 26, 2014
 Engineers for Exploration members have just returned from an expedition to Emerald Bay, Lake Tahoe, California, where they were imaging a pair of sunken Gold Rush-era barges in collaboration with archaeologists from the Atlantic World Marine Archaeology Research Institute.
This project aims to provide digital tools for documentation of underwater archaeological sites. Conventional nautical archaeology techniques rely on recording the geometric structure of a shipwreck or other site with a ta...
Engineers for Exploration members have just returned from an expedition to Emerald Bay, Lake Tahoe, California, where they were imaging a pair of sunken Gold Rush-era barges in collaboration with archaeologists from the Atlantic World Marine Archaeology Research Institute.
This project aims to provide digital tools for documentation of underwater archaeological sites. Conventional nautical archaeology techniques rely on recording the geometric structure of a shipwreck or other site with a ta...
Inspiring the next Generation of Engineers
Posted on Apr 24, 2014
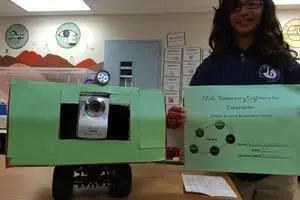 Engineers for Exploration is inspiring the next generation of explorer-engineers… Check out this awesome rover design from EE4E - Elementary Engineers for Exploration!!!
Our advisor Albert Lin gave a talk at Sandy Miller Elementary School in Las Vegas, where he was able to see some of the innovative archaeological and exploration tools developed by these elementary school students.
Engineers for Exploration is inspiring the next generation of explorer-engineers… Check out this awesome rover design from EE4E - Elementary Engineers for Exploration!!!
Our advisor Albert Lin gave a talk at Sandy Miller Elementary School in Las Vegas, where he was able to see some of the innovative archaeological and exploration tools developed by these elementary school students.
Pressure Testing Underwater Enclosures
Posted on Apr 24, 2014
 In preparation for an upcoming expedition to Lake Tahoe, we are building a stereo camera rig. This rig will be carried by a SCUBA diver and used to take stereo images of shipwrecks, which can later be used to create a realistic 3D model of the wreck. Our target wreck is at a depth of 40-50 ft, so we had to verify that our enclosures would remain water tight at that depth.
Josiah loading our camera enclosures into the pressure tank
We were generously assisted by Josiah Renfree of the Sout...
In preparation for an upcoming expedition to Lake Tahoe, we are building a stereo camera rig. This rig will be carried by a SCUBA diver and used to take stereo images of shipwrecks, which can later be used to create a realistic 3D model of the wreck. Our target wreck is at a depth of 40-50 ft, so we had to verify that our enclosures would remain water tight at that depth.
Josiah loading our camera enclosures into the pressure tank
We were generously assisted by Josiah Renfree of the Sout...
Triton Day 2014
Posted on Apr 5, 2014
 Engineers for Exploration participated in the Computer Science & Engineering Project Fair on Triton Day, UCSD’s recruitment day for admitted freshmen students. E4E demonstrated the Intelligent Camera Trap, the Stingray, and 3D models created by the Aerial Camera Platform.
Riley presenting the Intelligent Camera Trap
Eric presenting aerial projects and structure from motion models
Engineers for Exploration participated in the Computer Science & Engineering Project Fair on Triton Day, UCSD’s recruitment day for admitted freshmen students. E4E demonstrated the Intelligent Camera Trap, the Stingray, and 3D models created by the Aerial Camera Platform.
Riley presenting the Intelligent Camera Trap
Eric presenting aerial projects and structure from motion models
An Aerial Perspective on the Native Diver Excavation
Posted on Mar 23, 2014
 On March 8th, we collaborated with USC archaeologist Tom Garrison with his excavation of Native Diver, a famous racehorse buried at the Hollywood Park Racetrack in Inglewood, California. The Hollywood Park Racetrack is being permanently closed, and the horse’s remains are to be moved to the Del Mar Racetrack as its final resting place.
Our goal was to provide a top down perspective on the excavation using our Aerial Camera Platform. We created a timelapse of the excavation, seen in the video...
On March 8th, we collaborated with USC archaeologist Tom Garrison with his excavation of Native Diver, a famous racehorse buried at the Hollywood Park Racetrack in Inglewood, California. The Hollywood Park Racetrack is being permanently closed, and the horse’s remains are to be moved to the Del Mar Racetrack as its final resting place.
Our goal was to provide a top down perspective on the excavation using our Aerial Camera Platform. We created a timelapse of the excavation, seen in the video...
Stingray Joystick Control
Posted on Feb 6, 2014
 Themost recent developments for the Stingray include having a way to control the vehicle remotely using a Playstation 3 controller. Although the goal for the Stingray is to have complete autonomy, we wanted a way to be able to control the robot in situations where remote control is necessary (ie. difficult obstacles, retrieving the robot). We focused on using a Playstation 3 controller because it would be intuitive and easy to use for the operator.
This past month, we had the chance to tes...
Themost recent developments for the Stingray include having a way to control the vehicle remotely using a Playstation 3 controller. Although the goal for the Stingray is to have complete autonomy, we wanted a way to be able to control the robot in situations where remote control is necessary (ie. difficult obstacles, retrieving the robot). We focused on using a Playstation 3 controller because it would be intuitive and easy to use for the operator.
This past month, we had the chance to tes...
Baja California Site Visit
Posted on Jan 30, 2014
 Last week, members of Engineers for Exploration got to visit San Felipe, Baja California, Mexico, with the San Diego Zoo Institute for Conservation Research. San Felipe is a small fishing town on the west side of the Gulf of California that is a primary site of interest for conservation of the vaquita, a small porpoise that is the most endangered marine mammal. Since fishing is the main industry of the region and fishing bycatch claims the lives of an estimated 40 vaquita a year, the effort t...
Last week, members of Engineers for Exploration got to visit San Felipe, Baja California, Mexico, with the San Diego Zoo Institute for Conservation Research. San Felipe is a small fishing town on the west side of the Gulf of California that is a primary site of interest for conservation of the vaquita, a small porpoise that is the most endangered marine mammal. Since fishing is the main industry of the region and fishing bycatch claims the lives of an estimated 40 vaquita a year, the effort t...
Applications for 2014 Summer REU Now Open!
Posted on Jan 29, 2014
 We are now taking applications for our 2014 summer REU! If you are interested in spending the summer in San Diego and working on cool engineering projects and exciting fieldwork, please apply to be considered for our summer REU program. Submit your application here!
Last year, nine students from universities across the US worked on projects in underwater robotics, aerial vehicles, intelligent camera traps, and others. They worked with scientists and researchers from organizations including t...
We are now taking applications for our 2014 summer REU! If you are interested in spending the summer in San Diego and working on cool engineering projects and exciting fieldwork, please apply to be considered for our summer REU program. Submit your application here!
Last year, nine students from universities across the US worked on projects in underwater robotics, aerial vehicles, intelligent camera traps, and others. They worked with scientists and researchers from organizations including t...
Sony QX100 Quadcopter Testing
Posted on Jan 8, 2014
 We’ve been hard at work bringing up a quadcopter platform for aerial imagery surveys, as well as preparation for the radio collar tracking effort. For our aerial imagery, we want the highest quality picture from the lightest package, and Sony’s QX100 fits the bill, utilizing a 20.2MP 1” sensor and weighing only 182g. Here’s our experience interfacing with the QX100, and a sample of the images we took from the copter.
The QX100 features a Wi-Fi interface for control via a smartphone, so we ...
We’ve been hard at work bringing up a quadcopter platform for aerial imagery surveys, as well as preparation for the radio collar tracking effort. For our aerial imagery, we want the highest quality picture from the lightest package, and Sony’s QX100 fits the bill, utilizing a 20.2MP 1” sensor and weighing only 182g. Here’s our experience interfacing with the QX100, and a sample of the images we took from the copter.
The QX100 features a Wi-Fi interface for control via a smartphone, so we ...
E4E Flickr and Twitter
Posted on Jan 7, 2014
 Engineers for Exploration now has a Flickr page for media! In addition to posting on this site about our field expeditions and project updates, we will also be updating our Flickr with photos and videos from our activities. Our page is located at https://www.flickr.com/photos/ucsd-e4e/.
We also have a new Twitter account! Follow us at @UCSDE4E for pictures and updates.
Engineers for Exploration now has a Flickr page for media! In addition to posting on this site about our field expeditions and project updates, we will also be updating our Flickr with photos and videos from our activities. Our page is located at https://www.flickr.com/photos/ucsd-e4e/.
We also have a new Twitter account! Follow us at @UCSDE4E for pictures and updates.